Class and interface names
- SHOULD be a noun
- MUST use pascal case
- SHOULD use full words instead of acronyms
class Robot
class Drivetrain
class Launcher extends SubsystemBase
Method names
- SHOULD either be a verb or verb-noun combination
- MUST use camel case
public void periodic()
public void setVelocity(double velocity)
Boolean methods
- SHOULD use
isorhasas a prefix before the function name - MUST NOT be negated (an example of a negated name would be
isNotSpinning) - SHOULD ask a question that can be answered
trueorfalse
boolean isIntakeLowered() {...}
boolean isFlywheelAtTarget() {...}
Command names
- SHOULD either be a verb or verb-noun combination
- SHOULD end in
Command
Command raiseArmCommand() {/* A command to raise the arm */}
void raiseArm() {/* A method to raise the arm */}
class LockWheelsCommand extends Command {...}
class WaitUntilButtonCommand extends Command {...}
Variable names
Variables
- MUST be a noun
- MUST use camel case
- SHOULD accurately describe the function of the variable without any other context
Motor motor;
double speed;
int velocityRPM;
Boolean variables
- SHOULD use
isorhasas a prefix before the variable name - MUST NOT be negated (an example of a negated name would be
isNotSpinning) - SHOULD ask a question that can be answered
trueorfalse
boolean isIntakeLowered;
boolean isFlywheelAtTarget;
Constants
- MUST be a noun
- MUST use uppercase snake case
- MUST accurately describe the function of the constant without any other context
- SHOULD be declared with
publicstaticandfinalmodifiers
public static final double MIN_BATTERY_VOLTAGE;
public static final int CLIMBER_ID;
Enum names
- MUST use pascal case
- Constants MUST use uppercase snake case
- SHOULD describe the general function, not the function of all the options
enum IntakeMode {
FLOOR,
SOURCE,
}
MUST NOT use
enum IntakeFloorSource {
FloorMode,
source
}
Importing classes
The following rules will be follwed by classes imported by VSCode.
- MUST be listed explicitly
import frc.robot.commands.ResetGyro;
import frc.robot.commands.swerve.TurnToAngle;
MUST NOT use
import frc.robot.commands.*;
Method / class modifiers
- MUST be given in the following order
<access> static abstract final
(access aka public, private, etc.)
For example:
public static XBoxController driverController;
MUST NOT use
static public XboxController operatorController;
Method Order
Methods within a class SHOULD be in the following order.
- Constructor
- Periodic
- Commands
- Getters
- Setters
- Other functions
Javadoc
- Java classes, methods, and constants SHOULD have a valid and complete Javadoc entry accompanying them
- If present, Javadoc entries MUST describe the full function of the object they are documenting, even if the description is redundant with the name of the object
- Javadoc entries MUST accurately describe the function of any parameters
- Javadoc entries MUST describe the return type and returned object if applicable
- Javadoc entries SHOULD include any implementation specifics that might be useful to whoever is using the object
- Javadoc entries SHOULD be written in sentence case with appropriate punctuation
- Descriptions of Javadoc annotations like
@paramand@returnMUST be on the next line - References to classes SHOULD be linked to the classes they are referencing to make browsing the hosted Javadoc easier
Examples:
/**
* Safely sets the target angle for the arm.
*
* @param targetDegrees
* the target angle for the arm in degrees
*/
public void setArmTarget(double targetDegrees) {
...
}
/**
* Gets the velocity of the {@link Arm}.
*
* @return
* the velocity of the arm in m/s
*/
public double getArmVelocity(){
...
}
When you hover over a function with Javadoc anywhere in the project it will apear. 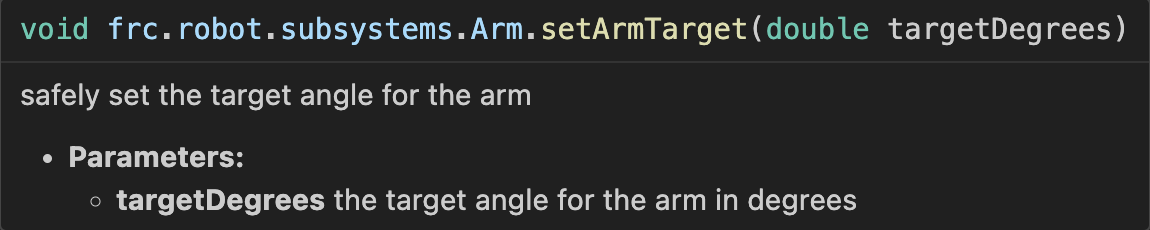
An example of what the hosted Javadoc looks like can be found here.
Comments
- Code behavior and general landmarks SHOULD be described in comments
- Contributors MAY decide where and how to use comments, but they SHOULD at least describe enough that someone who hasn’t ever seen the class before can quickly find what they need to change and understand the basic function of the class